Электродвигатель постоянного тока с параллельным возбуждением
Содержание статьи:
Одно из самых распространенных устройств для преобразования электроэнергии – электродвигатель постоянного тока с параллельным возбуждением. Он состоит из компонентов, взаимодействие которых обеспечивает эффективную работу машины при подключении к источнику питания. Рассмотрим подробнее характеристики и сферы применения данного типа оборудования.
Устройство
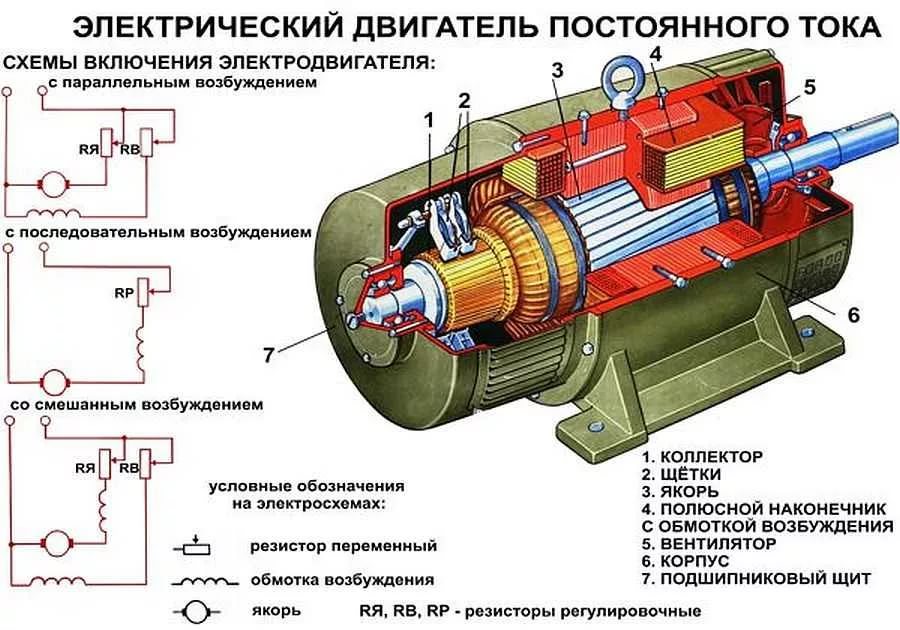
ЭПТ с параллельным возбуждением состоит таких элементов, как:
- якорь;
- обмотка возбуждения;
- коллектор;
- щетки;
- корпус;
- валы.
Корпус представляет собой железную конструкцию, которая защищает якорь и обмотку возбуждения от внешнего воздействия. Также он может служить как система охлаждения для двигателя. Вал является механической частью двигателя и служит для передачи механической энергии от двигателя к механизму, который он приводит в движение.
Якорь представляет собой сердечник из магнитопровода, на который намотаны провода. Внутри находятся железные якорные лопасти, которые образуют полюса. На эти лопасти также намотаны провода. В результате ток проходит через провода на лопасти, создавая магнитное поле вокруг них.
Обмотка возбуждения находится внутри корпуса и состоит из проводов, намотанных на магнитопровод. Обмотка образует электромагнит, который создает магнитное поле внутри корпуса. Коллектор является проводящим кольцом, на котором находятся щетки. Щетки по схеме контактируют с коллектором и позволяют току протекать через якорь. Обычно они сделаны из углеродного материала и имеют форму прямоугольных блоков.
Характеристики
Электродвигатель постоянного тока с параллельным возбуждением имеет ряд характеристик, определяющие его работу. Они зависят от конструкции, размеров и технических параметров определенной модели. Некоторые из основных характеристик:
- номинальное напряжение и ток;
- номинальная мощность;
- эффективность – это соотношение между мощностью, производимой двигателем, и электрической мощностью, потребляемой им;
- максимальный крутящий момент при заданной скорости вращения;
- коэффициент мощности – это отношение мощности, производимой двигателем, к полной потребляемой;
- степень защиты – обычно указывается в формате IP (International Protection) и состоит из двух независимых чисел, первое из которых указывает на защиту от пыли, а второе – от влаги;
- рабочий диапазон температур – при котором двигатель может работать без потери производительности или поломки;
- скорость вращения – зависит от напряжения, подаваемого на двигатель;
- масса – это вес двигателя без учета крепежных элементов и прочих деталей, важна для расчета грузоподъемности системы, в которую он устанавливается.
Сферы применения
Электродвигатели постоянного тока с параллельным возбуждением широко используются в различных областях промышленности и транспорта. Они применяются для привода различных механизмов, включая конвейеры, насосы, вентиляторы, тяговые механизмы, электромобили и другие устройства, где требуется постоянная скорость вращения и высокий крутящий момент.
ЭПТ с параллельным возбуждением также применяются в системах автоматического управления, таких как автоматические регуляторы напряжения и частоты. Они используются для стабилизации напряжения в электрических сетях и регулирования мощности генераторов.
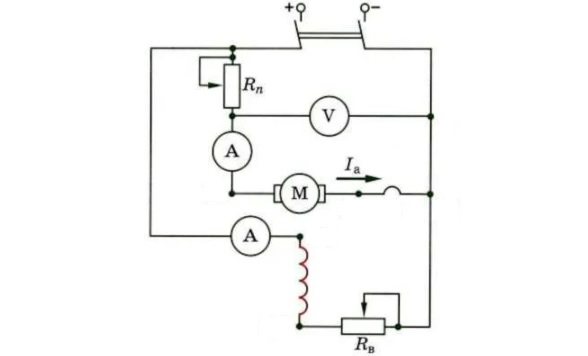
Регулирование частоты вращения двигателя
Регулирование осуществляется различными способами, в зависимости от конкретных условий эксплуатации и требуемой точности регулирования. Наиболее распространенные методы регулирования частоты вращения этого типа двигателя:
- Изменение напряжения питания. При увеличении напряжения питания скорость вращения возрастает, а при уменьшении – снижается. Однако данный принцип имеет некоторые недостатки, в частности, он не позволяет получить высокую точность регулирования и может привести к повреждению двигателя при слишком большом напряжении.
- Изменение сопротивления цепи возбуждения. При увеличении сопротивления скорость вращения снижается, а при уменьшении – возрастает. Этот метод обладает большей точностью, но может привести к увеличению потерь мощности и нагреву цепи возбуждения.
- Использование резисторов для регулирования скорости. Резисторы позволяют регулировать ток возбуждения и, соответственно, скорость вращения двигателя. Этот метод обладает высокой точностью, но требует использования дополнительных элементов управления и может быть достаточно сложным в реализации.
- Использование электронных преобразователей частоты. Они работают путем изменения частоты и напряжения питания двигателя, что позволяет регулировать скорость вращения в широких пределах с высокой точностью и без существенных потерь мощности. Этот метод наиболее эффективен при работе с большими мощностями и высокой точностью регулирования, но также требует дополнительных затрат на приобретение и установку преобразователя.
В зависимости от конкретных условий эксплуатации и требований к регулированию частоты вращения, может использоваться любой из перечисленных выше методов, или их сочетание. Важно учитывать, что регулирование частоты должно производиться с помощью технологических процессов, а не непосредственно вручную, чтобы исключить возможность ошибок и повреждений оборудования.